AIMS Lie Groups: Fall-2022 Quiz : Due 14 Thu 22 Dec
Matrix exponentiation
S0 4496S
Consider the rotation matrix
\[
r_z = \begin{pmatrix}0&-1&0\\1&0&0\\0&0&0\end{pmatrix} \in\mathfrak{so}(3) .
\]
Exponentiate this matrix, that is, determine \(e^{r_z\alpha}\) for
\(\alpha\in\mathbb{R}\).
The Lie group $SO(3,2)$
S0 4496S
The Lie group \(G=SO(3,2)\) preserves the “length” \(|v|\) defined by
\[
|v|^2=v_1^2+v_2^2+v_3^2-v_4^2-v_5^2
\]
for \(v\in\mathbb{R}^5\).
What size are the matrices in \(G\)?
What is the dimension of \(G\) (as a manifold)? Equivalently, what is the
dimension of the corresponding Lie algebra \(\mathfrak{g}=\mathfrak{so}(3,2)\)
as a vector space?
How many (independent) boosts, and how many (independent) rotations, are there
in \(G\)?
You do not need to determine the elements of \(G\) or
\(\mathfrak{g}\) in order to answer these questions.
The Lie algebra $\mathfrak{so}(2,1)$
S0 4496S
A basis for \(\mathfrak{so}(2,1)\) is given by
\[
e_1 = \sigma_z=\begin{pmatrix}1&0\\0&-1\end{pmatrix} ,
\qquad
e_2 = \sigma_x=\begin{pmatrix}0&1\\1&0\end{pmatrix} ,
\qquad
e_3 = s_y=\begin{pmatrix}0&-1\\1&0\end{pmatrix} .
\]
Determine the matrix representation of the Killing form
\(B(X,Y) = \mathrm{tr}(XY)\)
in this basis, that is, determine the matrix whose components are
\(b_{mn}=B(e_m,e_n)\).
Determine \(B(\sigma_+,\sigma_+)\) and \(B(\sigma_+,\sigma_-)\), where
\(\sigma_+ = \sigma_x - s_y\) and \(\sigma_- = \sigma_x + s_y\).
Octonionic rotations
S0 4496S
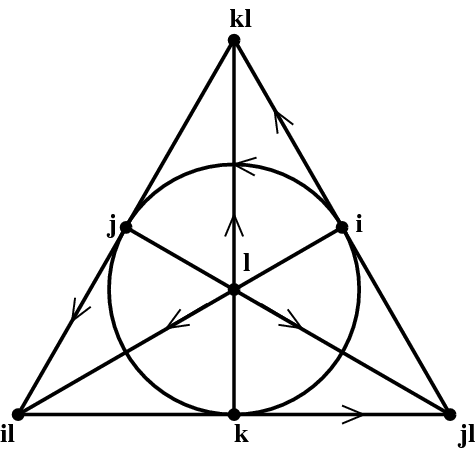
The octonionic multiplication table is given below.
A quaternion \(q\in\mathbb{H}\) can be written as
\[
q = q_1+q_2i+q_3j+q_4k .
\qquad\qquad\qquad
\]
Determine \(P(q)=j(iqi)j\).
An octonion \(x\in\mathbb{O}\) can be written as
\[
x = x_1+x_2i+x_3j+x_4k+x_5k\ell+x_6j\ell+x_7i\ell+x_8\ell .
\qquad\qquad\qquad
\]
Determine \(Q(x)=j(ixi)j\).
Describe in words what the transformations \(q\longmapsto P(q)\) and
\(x\longmapsto Q(x)\) do to \(q\) and \(x\), respectively.